Servo Autoturning
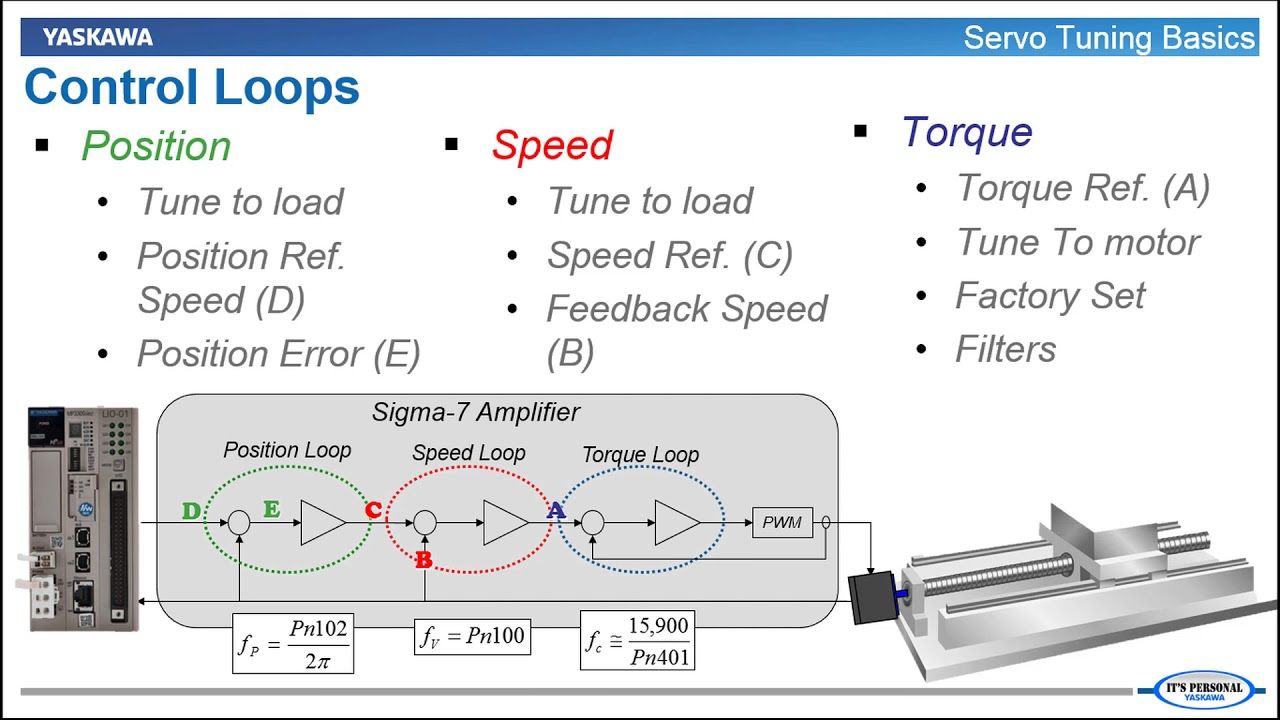
Chào mọi người. ở bài viết này mình sẽ chia sẻ và giải thích cách cài đặt và chạy chế độ auto turning(オートチューニング) để tính toán hệ số (ゲイン)Của servo motor_(サーボモーター).
Chắc hẳn mọi người khi nghe đến auto turning thì cũng thấy quen quen đúng không ạ.
Auto turning là chế độ tự động hoạt động để tính toán cài đặt hệ số nào đó. Ví dụ như hệ số PID…
ở động cơ servo. Khi hoạt động sẽ có trường hợp động cơ rung lắc hay phát ra tiếng ồn(ハンチング)
thì khi gặp trường hợp này mình nên sử lý như thế nào. Và các thông số liên quan đến vấn đề này ở đâu. Ở bài viết này mình sẽ chia sẻ với mọi người.
1. Các thông số parameter liên quan (パラメータ関係)
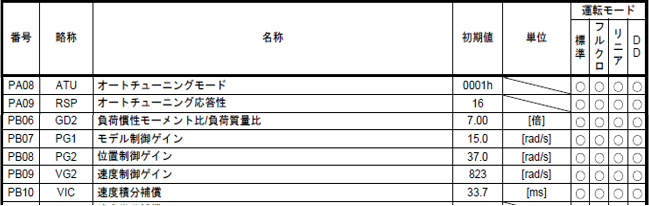
Động cơ servo thì có rất nhiều parameter khác nhau. Mỗi parameter đều có chức năng và ý nghĩa riêng. Nay mình sẽ tập tập phân tích các parameter liên quan đến chế độ autoturing(オートチューニング)
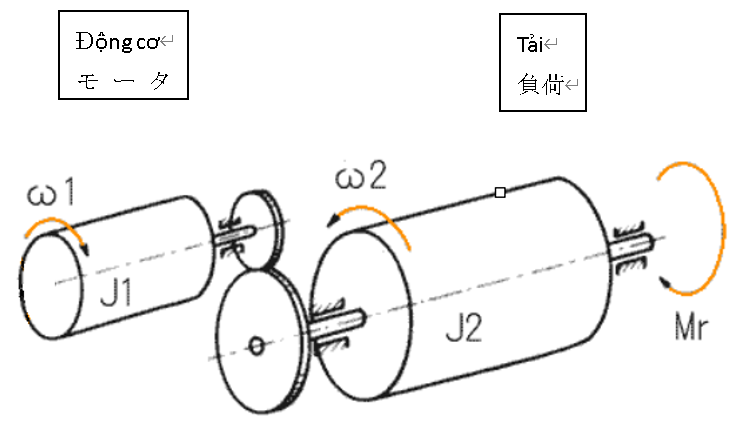
Ø PB06 GD2: 負荷の慣性モーメント/サーボモーター自身の慣性モーメント
(Tỉ lệ momen quán tính của tải và tỉ lệ momen quán tính của bản thân động cơ)
Ví dụ:
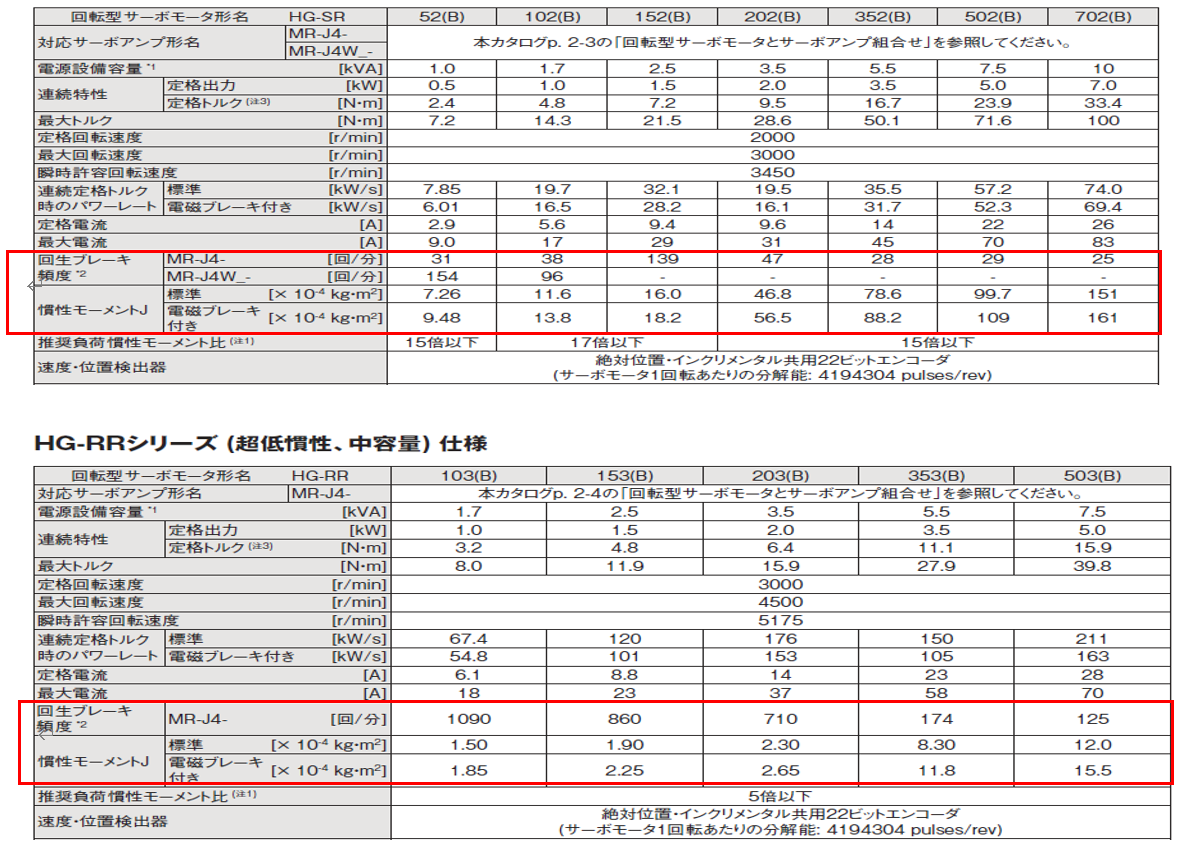
モーターの慣性:46.8[10-4kg m2] (HG-SR202)(quán tính của động cơ HG-SR202 là 46.8)
負荷の慣性:GD2 = 10 [倍] = 468[10-4kg m2] (hệ số quán tính của tải sẽ là 468)
Đối với từng công suất model. Hệ số chọn sẽ khác nhau.
Ví dụ HG-SG 202B, 352B,502B,702B hệ số cho phép cài đặt nhỏ hơn 15 lần.
HG-RR hệ số cho phép cài đặt nhỏ hơn 5 lần.
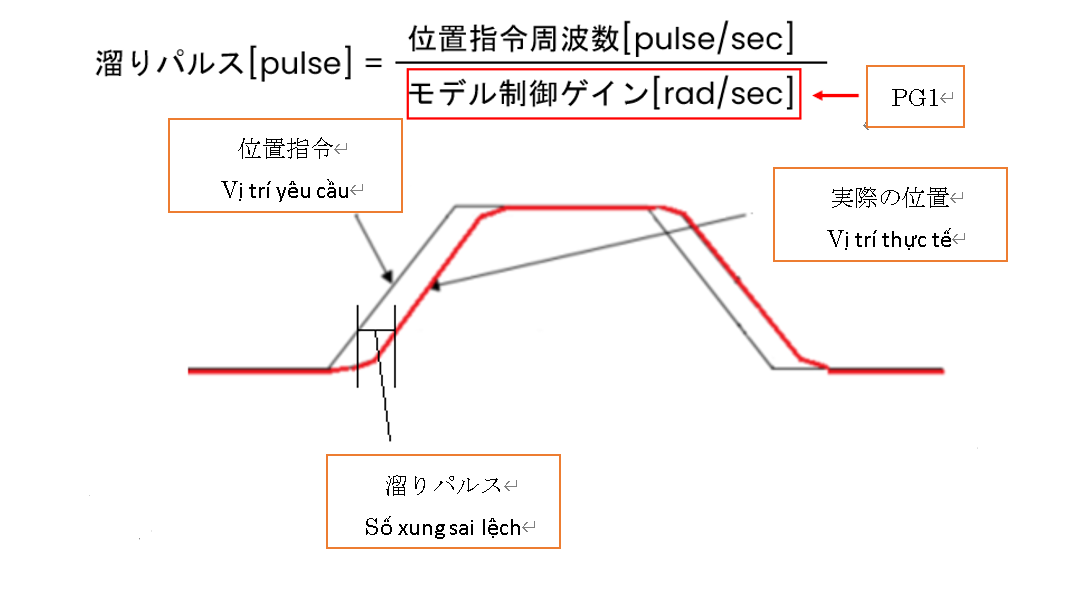
Ø PG1 モデル制御ゲイン、位置指令に対する応答性(độ trễ so với vị trí yêu cầu)
Ø VIC 速度積分補償 (速度指令に対する積分時定数) hằng số thời gian tích phân cho lệnh tốc độ
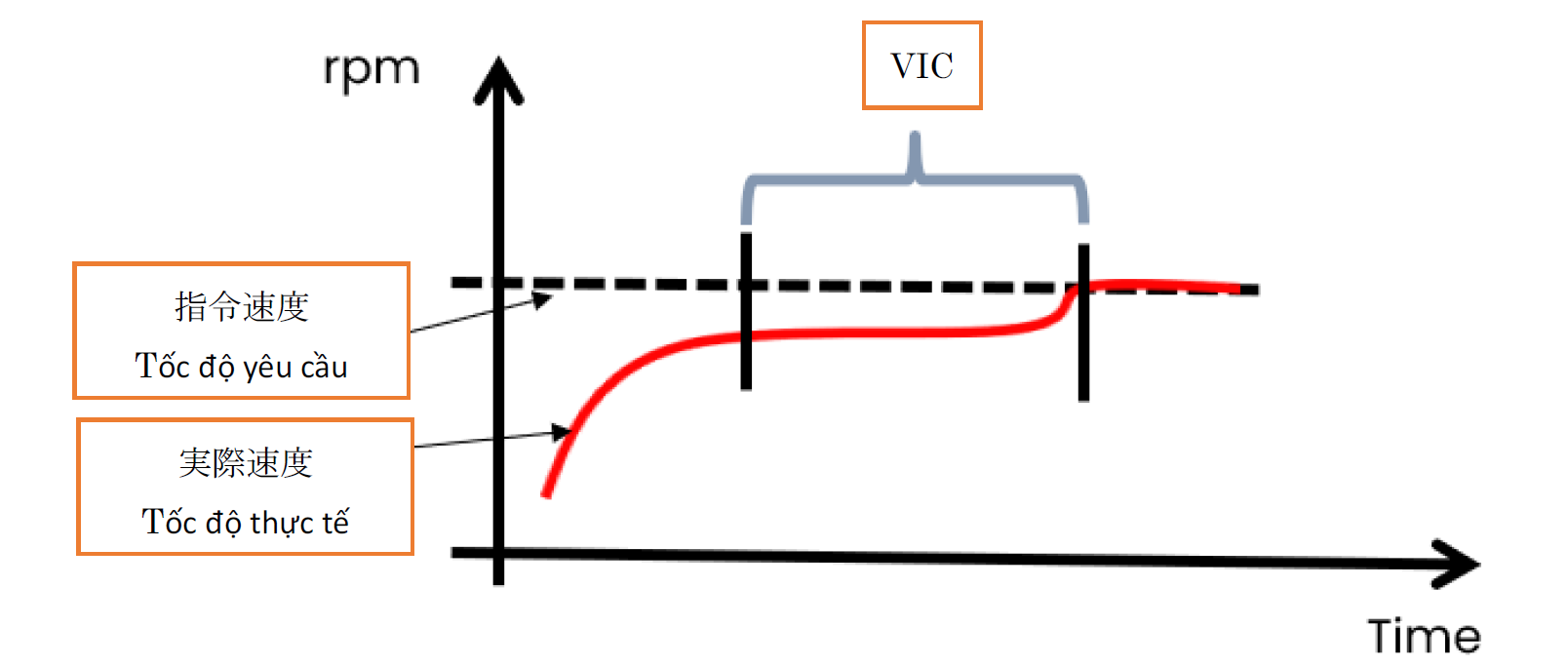
Khi tốc độ động cơ servo gần đến tốc độ yêu cầu( サーボモーターが指令速度に到達する際) nó sẽ giảm tốc độ tăng tốc và từ từ đạt đến tốc độ yêu cầu. Và khoảng time này được gọi là hệ số VIC(この時の時間をVICという).
・VICを大きくする:オーバーシュートを防ぐが、追従性が低下する
・VICを小さくする:指令への追従性が上がるが、オーバーシュートする
VIC lớn quá thì chống được sự vọt lố của tốc độ nhưng giảm sự theo sát của lệnh tốc độ.
VIC nhỏ quá thì theo dõi được lệnh tốc độ nhưng khả năng bị vọt lố tốc độ sẽ xảy ra
Ø PG2 位置制御ゲイン、(外乱に対する応答性:khả năng đáp ứng nhiễu)
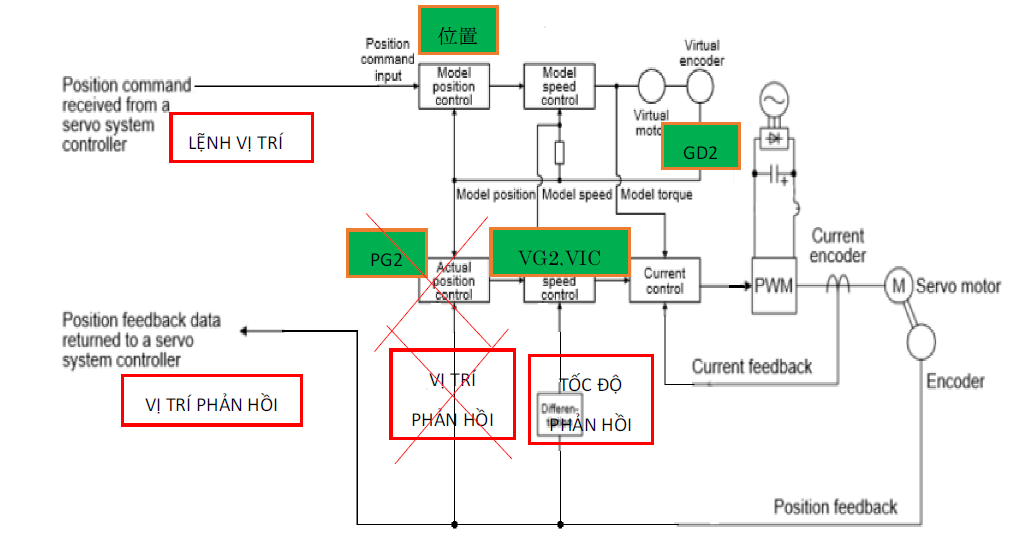
Giả sử hệ thống PG2= 0( loại bỏ PG2_) thì khi dùng tay quay nhẹ động cơ động cơ sẽ không thể tự động quay về vị trí cũ được chính xác (位置制御ループがない場合、手で原反軸を回したとき、元の位置に戻ることができない。)
Ø VG2 速度制御ゲイン: 速度指令に対する応答性(phản hồi lại lệnh tốc độ)
Parameter này liên quan đến sự rung lắc động cơ, hoặc phát ra tiếng ồn bất thường giữa mối quan hệ giữa tải và động cơ.
周期の短いハンチング( rung lắc trong chu kì ngắn) => VG2 cài đặt lớn

周期の長いハンチング( rung lắc trong chu kì dài) => VG2 cài đặt bé

Ø オートチューニングモード(PA08)
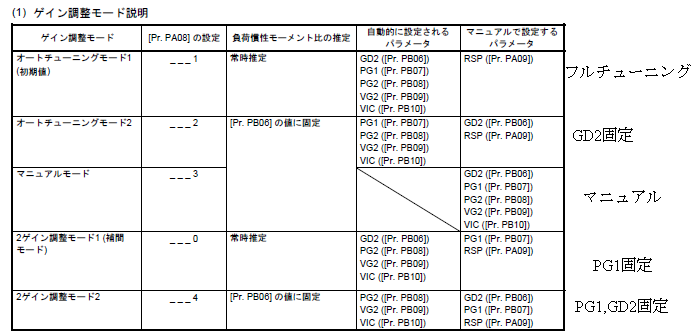
オートチューニングの手順としては、
- PA08=0 でPG1以外をチューニングする(PG1は固定値)
- PA08=3 に変更する マニュアルモードをする
- ハンチングする場合はVG2, VICを微調整する
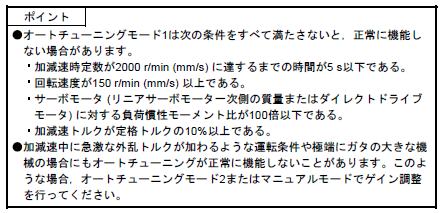
上記注意事項があります。
PA08=1でチューニングする場合は気をつけること
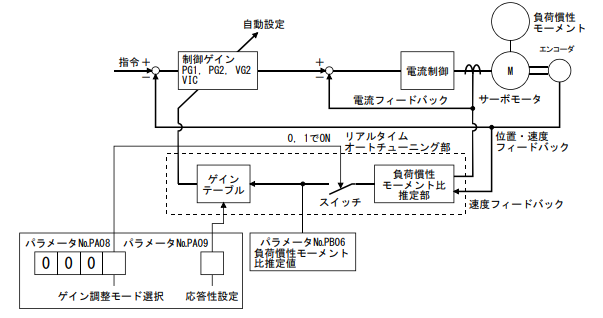
PA08(チューニングモード)が0 or 1の場合のみ、
スイッチをONさせてGD2を推定する。
それ以外は手動で入力した値を使用する。
推定or設定されたGD2とPA09(応答性)の値を元に、
三菱が準備したゲインテーブルから各ゲインを参照して設定される。
Ngoài ra còn rất nhiều parameter khác, chức năng cũng như cách cài đặt khác. Mọi người có thể tìm tài liệu của hãng đọc thêm và có gì thắc mắc cũng có thể liên hệ với mình qua page VJAU, mình sẽ hỗ trợ trong phạm vi kiến thức của mình
Bài sau mình sẽ chia sẻ về cài phần mềm điều lập trình motion, các lệnh chuyên dụng, các phương pháp về home….. Nếu mọi người ủng hộ mình sẽ viết thêm phương pháp chạy cam, quản lý biến và chương trình SFC hiệu quả, chạy vị trí, nội suy, đồng bộ……
Và cuối cùng chúc mọi người ngày mới thật tràn đầy năng lượng ạ.
Đăng Huyên

Comments ()