Động cơ Servo là gì? Kinh nghiệm chọn động cơ

Động cơ servo và lựa chọn động cơ servo
Nội dung(内容)
1. Động cơ servo là gì
2. Cấu tạo động cơ Servo
3. Các dòng động cơ Servo của hãng Mitsubishi
4. Phương pháp lựa chọn động cơ
1. Động cơ servo là gì(サーボモーターとは)
Nó chính là 1 hệ thống truyền động, hồi tiếp vòng kín. Các động cơ Servo sẽ nhận tín hiệu từ lệnh của PLC và thực hiện chính xác, nhanh chóng.Bộ Servo hoàn chỉnh sẽ bao gồm: 1 encoder, 1 motor Servo và 1 Servo driver. Chức năng chính của Servo đó là điều khiển vị trí, thay đổi tốc độ chính xác, điều chỉnh momen phù hợp với những ứng dụng công việc.
2. Cấu tạo động cơ servo(サーボモーターの構成)
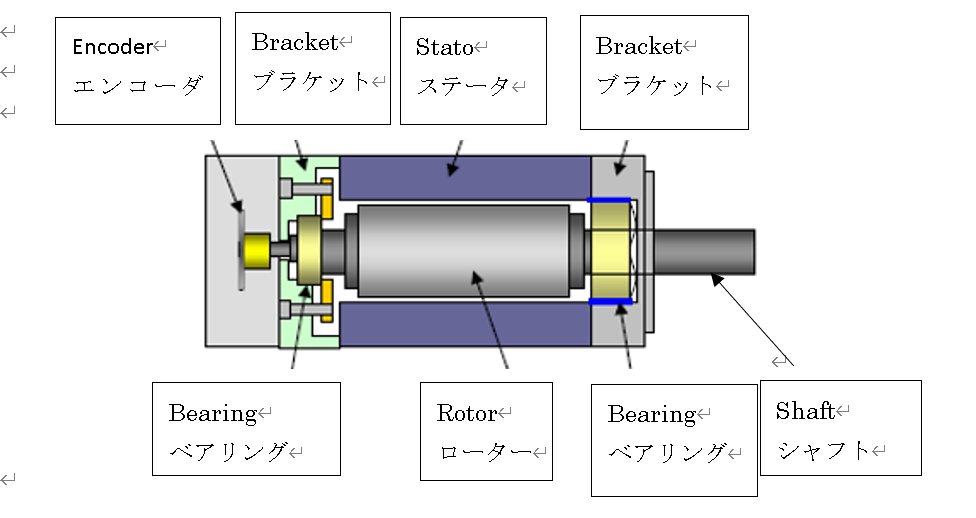
+ Encoder(エンコーダー): Bộ phận quan trọng của hệ Servo thường được gọi là bộ mã hóa Encoder, trên thị trường hiện tại có 2 dạng encoder được sử dụng chính cho các bộ Servo:
Ø Encoder tương đối: cấu tạo chuẩn của nó sẽ có 2 đĩa đặt lệch nhau 90 độ, tạo xung A và B. Hoặc là 1 đĩa nhưng bố trí 2 vòng lồng vào nhau lệch nhau 90 độ để tạo xung A và B. Ngoài ra, còn có pha Z để xác định trục động cơ quay hết một vòng cùng các nguồn sáng LED cùng bộ thu phát quang học.
Ø Encoder tuyệt đối: Cấu tạo có bộ phát ánh sáng (LED), đĩa mã hóa (có chứa dải băng mang tín hiệu), một bộ thu ánh sáng nhạy với ánh sáng phát ra khá tương đồng với encoder tương đối. Tuy nhiên phần đĩa mã hóa ở Encoder tuyệt đối được bố trí dày đặc ứng với từng bit của độ phân giải và chế tạo từ vật liệu trong suốt, người ta đã chia mặt đĩa thành các góc đều nhau cùng các đường tròn đồng tâm.
+ Stato: Ở bộ phận này sẽ được gắn với khung động cơ được quấn dây theo kiểu quấn dải để đảm bảo sức điện động của động cơ tạo ra có dạng hình Sin, tạo ra từ trường quay khi được cấp điện và được điều khiển bởi Servo Driver đi kèm là quay trục động cơ theo hiện tượng cảm ứng điện từ.
+ Rotor: Sẽ được bao gồm trục động cơ được gắn nam châm vĩnh cửu có mật độ từ trường cao, tổn thất từ trường thấp, có khả năng tái nạp lại từ trường trong quá trình hoạt động. Đây chính là điểm khác biệt cơ bản nhất trong cấu tạo của động cơ PM so với động cơ IM và động cơ DC mang lại momen quay ổn định trong dải tốc độ định mức của động cơ.
Chú ý: Mômen quán tính của bản thân động cơ được xác định chủ yếu bởi đường kính của rôto bên trong. Rotor lớn quán tính momen lớn. Rotor nhỏ quán tính momen nhỏ.
Bearing: được gọi là Phần ổ bi (vòng bi) được sử dụng để nâng đỡ phần Rotor để có thể quay tròn ổn định theo một trục của nó.
Bracket: được gọi là Phần vỏ động cơ để bao bọc và bảo vệ động cơ, chứa đầu nối dây từ các cuộn dây của Stato đưa ra bên ngoài.
3. Các dòng servo của hãng Mitsubishi(三菱シリーズ形名)
HG-SR(dung lượng trung bình/ quán tính trung bình)(中容量/中慣性),
HG-RR(dung lượng trung bình/quán tính cực thấp), (中容量/超低慣性)
HG-KR(dung lượng thấp/quán tính thấp)(小容量/低慣性)
HG-MR(dung lượng thấp/ quán tính cực thấp) (小容量/超低慣性)
HG-JR (dung lượng trung bình-cao-cực cao/ quán tính thấp)( 中・大・超大容量・低慣性)
Ngoài ra còn nhiều dòng khác như là HG-UR,HG-AK.
Dung lượng thấp(小容量) : 0.05kw~0.75kw
Dung lượng trung bình(中容量) : 0.5kw~ 7.0kw
Dung lượng trung bình-cao-cực cao(中・大・超大容量) :0.05~220kw
4. Phương pháp lựa chọn động cơ servo.(サーボモーターを選び方)
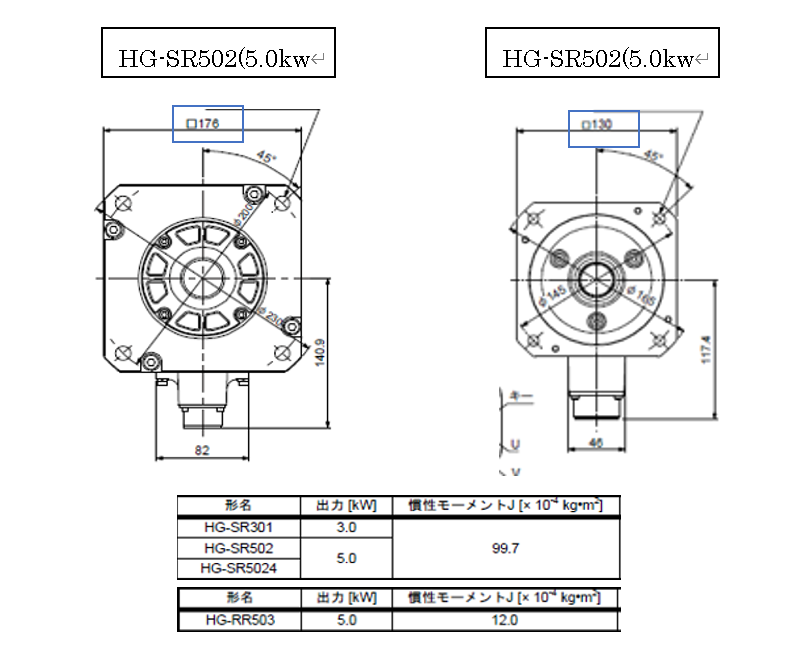
Nhìn vào hình ta thấy. cùng một dung lượng 5.0kw nhưng kích thước rotor khác nhau.
Thì rotor to hơn sẽ có lực momen lớn hơn. Đồng nghĩa với việc tốc độ phản hồi chậm hơn. Nhưng độ ổn định sẽ cao hơn loại cùng dung lượng nhưng rotor nhỏ hơn.
(同じ容量でも太さが違う。ローターが太い方が、応答性が低い、安定性が高い)
Nhìn vào hình ta sẽ thấy được. kích thước rotor như nhau nhưng chiều dài khác nhau. Thì loại rotor có kích thước dài hơn sẽ có dung lượng lớn hơn nhưng lực momen sẽ không tăng lên bao nhiêu.(同じ太さでも容量が違う。ローターを長くすることで、慣性を抑えつつ、容量UPしている)。
Kết luận:
Dựa vào kích thước của trục rotor mà lớn thì lực momen sẽ lớn. Và khi lực momen lớn đồng nghĩa với việc động cơ sẽ hoạt động ổn định hơn nhưng độ phản hồi sẽ có phần chậm hơn so với động cơ cùng dung lượng nhưng có trục rotor nhỏ hơn.
Và chiều dài trục rotor dài hơn nhưng kích thước bằng nhau. thì lực momen dường như không thay đổi đáng kể. nhưng dung lượng của trục rotor dài hơn sẽ thay đổi đáng kể đấy.
Momen trung bình, lực quán tính của bản thân động cơ trung bình thì động cơ hoạt động ổn định cho dù tải lớn phù hợp với chạy tốc độ và vị trí.
Moment nhỏ lực quán tính của bản thận động cơ nhỏ thì sự phản hồi của động cơ sẽ lớn phù hợp với hệ tốc tốc độ cao, thay đổi tốc độ liên tục.
慣性
・中慣性:サーボモーター自体の慣性モーメントが「中ぐらい」
→高負荷でも安定した運転に向いている→「周速系、位相系」
・低慣性:サーボモーター自体の慣性モーメントが「小さい」
→応答性が高いので、高頻度運転に向いている→「周期変速系」
Và bài này giúp cho mọi người hiểu được phần nào sẽ servo cũng như lựa chọn được động cơ servo phù hợp với yêu cầu thiết kế của mình rồi đúng không nào.
Bài tiếp theo mình sẽ chia sẻ cách cài đặt auto turning servo để động cơ hoạt động êm hơn, ổn định hơn dựa theo kinh nghiệm của mình.
Nếu có thắc mắc hay góp ý gì, đừng ngại liên lạc với mình ở page VJAU nhé!
Giờ thì chúc cả nhà một ngày mới tràn đầy năng lượng. !
宜しくお願い致します。
Đăng Huyên
Comments ()