Ngôn ngữ SFC( モーションSFC言語)
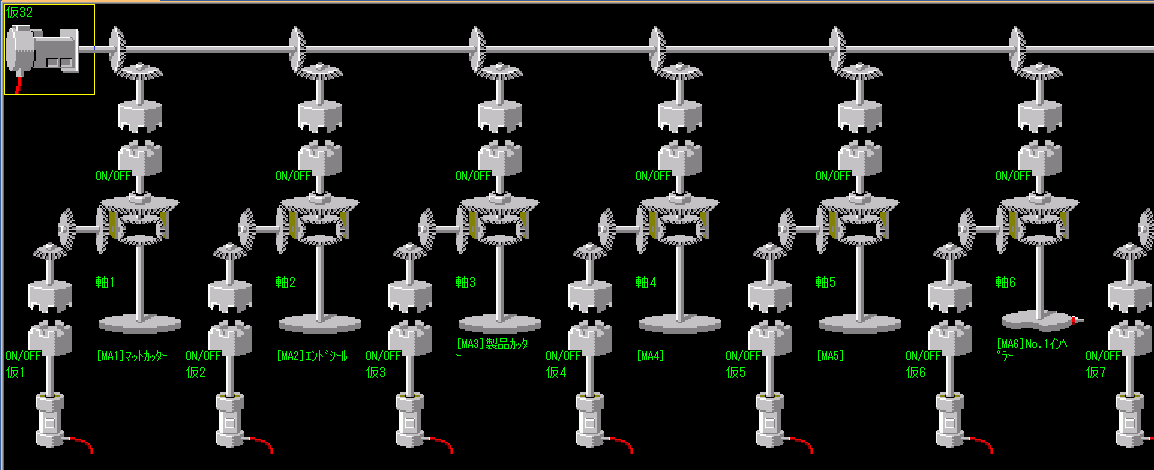
Motion là loại CPU dùng để điều khiển chuyển động của servo. Có thể hoạt động chế độ trục thực và trục ảo giúp ta điều khiển trực quan hơn và dễ dàng hơn. Như ở chế độ đồng bộ nhiều trục, chạy chế độ cam, thay đổi tốc độ, thay đổi tỉ lệ số gear một cách dễ dàng hơn như ở hình trên.( メカ機構)
Nội dung:
- Ngôn ngữ SFC là gì
- Phần mềm điều lập trình điều CPU motion
- Các lệnh thường dùng trong ngôn ngữ SFC
- Chu trình quét của chương trình SFC
- Chế độ trục ảo và trục thực
- Tổng kết
1. Ngôn ngữ SFC là gì (SFCとは)
・Nó là một ngôn ngữ lập trình tiêu chuẩn của PLC (PLC用標準プログラミング言語の一つ)
・Được thể hiện dưới dạng sơ đồ flow chart (フローチャートのような形で表記される)
・Là ngôn ngữ tương thích cho một chuỗi hoạt động liên tiếp nhau (一連動作に適した言語)
2. Phần mềm lập trình motion dùng ngôn ngữ SFC
Ở bài viết này mình đề cập đến phần mềm MT developer của hãng Mitsubishi.

Thanh công cụ của phần mềm khá giống với Gx works2,3.
Ở cột project windown
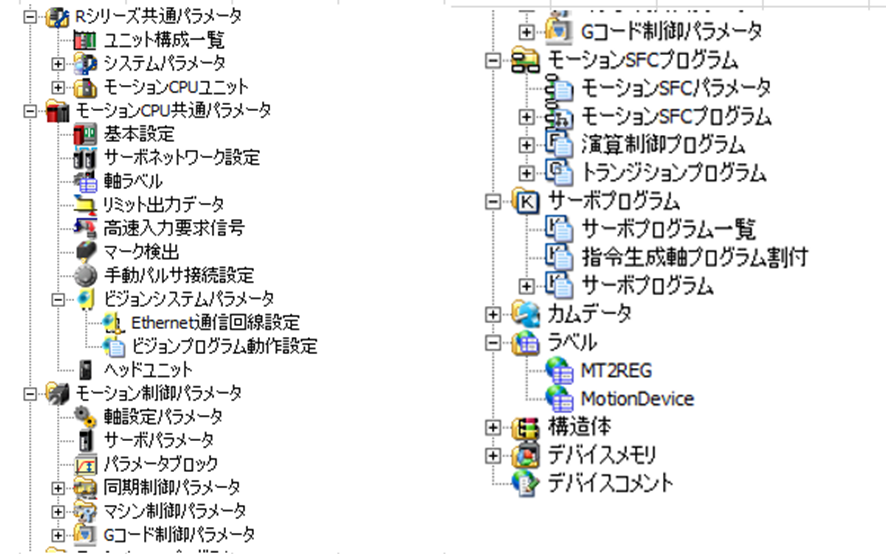
Gồm có các mục như là:
+ ユニット構成一覧 (cấu hình phần cứng) ở mục này sẽ cài đặt giống như mục I.O割付設定 mà bên Gxwork2,3 ta hay cài đặt.
+ システムパラメータ(parameter cho hệ thống) ở mục này mình sẽ cài thông số đa CPU (multi マルチ) cho hệ thống。Vì motion CPU nó là một CPU nên khi cấu hình trên phần cứng ta phải chọn chế độ đa CPU ở 2 chương trình CPU main bên Gxwork và ở mục này phải cài giống nhau,. Nếu sai sẽ bị lỗi đa CPU.
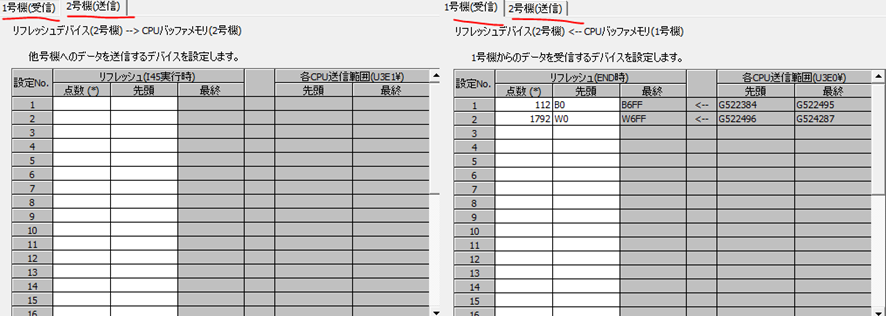
Ở đây ta có thể cài đặt địa chị liên kết giữa 2 CPU với nhau. ở bài này Mình chỉ set có 2 CPU 1 là main và 2 là CPU motion nên sẽ hiện 1号機受信(main nhận tín hiệu)2号機送信(cpu motion gửi tín hiệu)2 địa chỉ liên kết giữa 2 cpu này không được trùng nhau nhé mọi người.
モーションCPUユニット(unit cpu motion)ở mục này mình sẽ cài giống như bên PCパラメータ bên Gxworks nhé. Như là cài địa chỉ PLC デバイス。。。
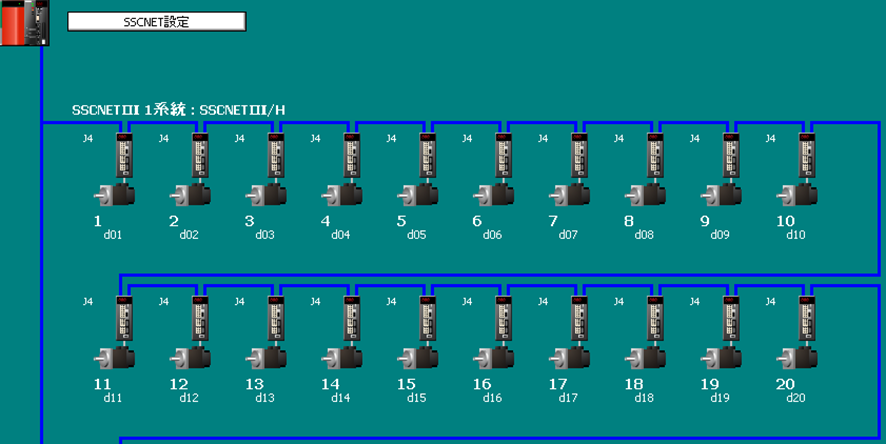
モーションCPU共通パラメータ ở mục này có cài đặt cấu hình cơ bản. Và hệ thống SSCNET của servo, số trục.....
Inbox ngay cho page nếu muốn tìm hiểu kĩ hơn nhé.
➡モーション制御パラメータ ở mục này thì mình sẽ cài đặt parameter chi tiết cho động cơ servo.(サーボモーターパラメータ。。cũng như là Gコード制御パラメータ。。
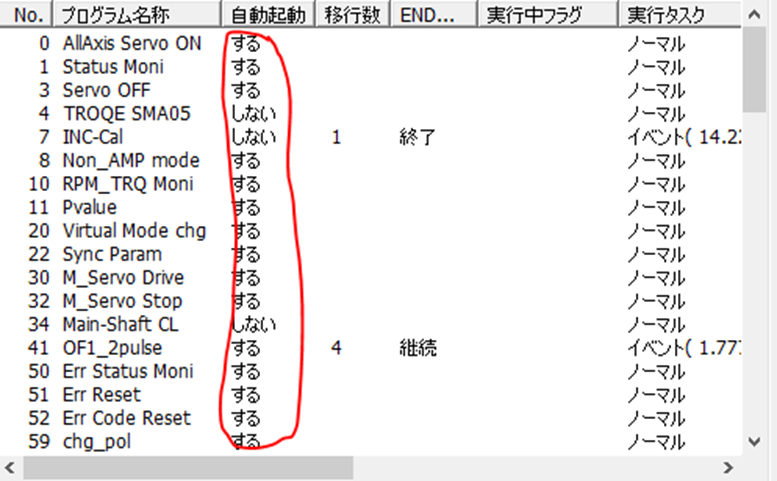
➡モーションSFCプログラム ở mục này là mục mình viết tất cả các chương trình SFC. Về hôm chạy cam, vị trí.tính toán.......
Và ở mục này có thể cài đặt được chương trình nào hoạt động hoặc không hoạt động được nhé.
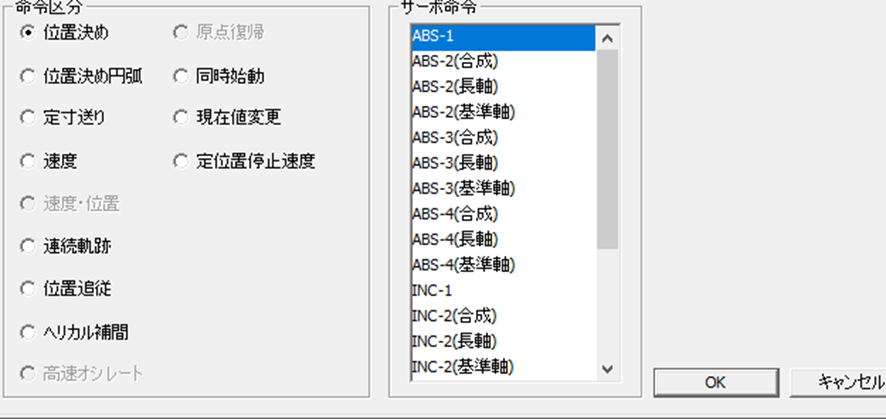
➡サーボプログラム mục này là cài đặt tất cả các chương trình của servo. Chạy nội suy 1,2,3,4 trục, chạy vị trí, chạy zero.....
➡ カムデータ ở mục này sẽ là nơi cài đặt giữ liệu chạy Cam của mình nhé.
Tóm lại trên đây là sơ bộ về phần mềm MT developer của hãng Mitsubishi. Mọi người muốn tìm hiểu sâu cách cài đặt thông số, đa CPU hay là parameter có thể tự tìm hiểu qua manual của hãng hoặc liên hệ với mình qua page nhé.
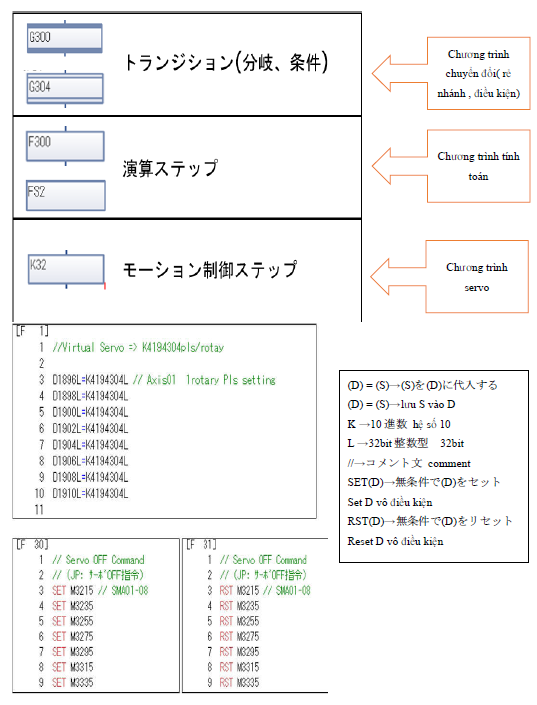
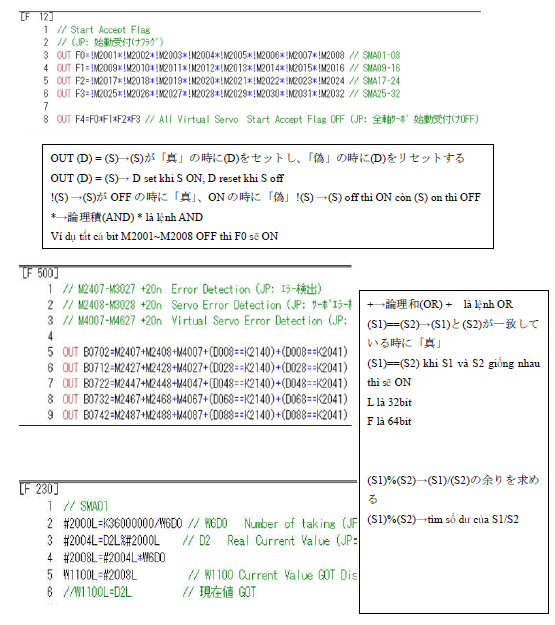
3. Các lệnh thường dùng trong ngôn ngữ SFC
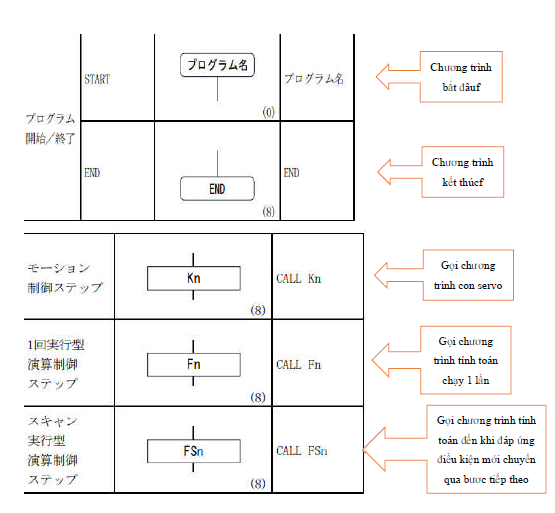
Vì có rất nhiều chương trình liên quan nên mình tạm gộp chung lại 3 chương trình chính.
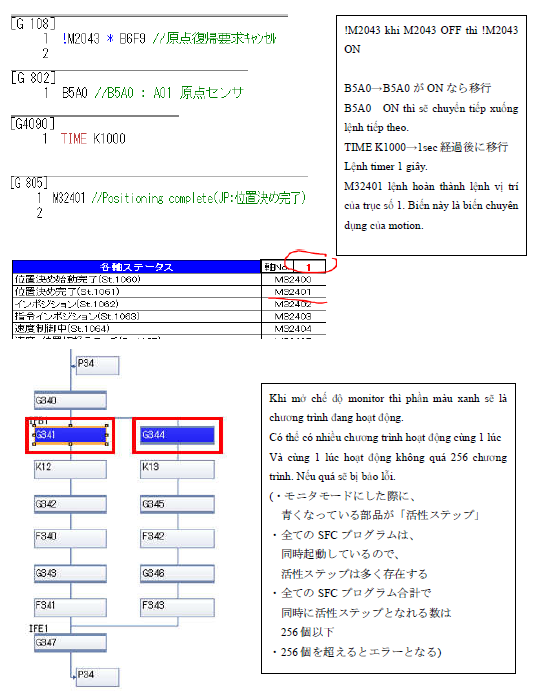
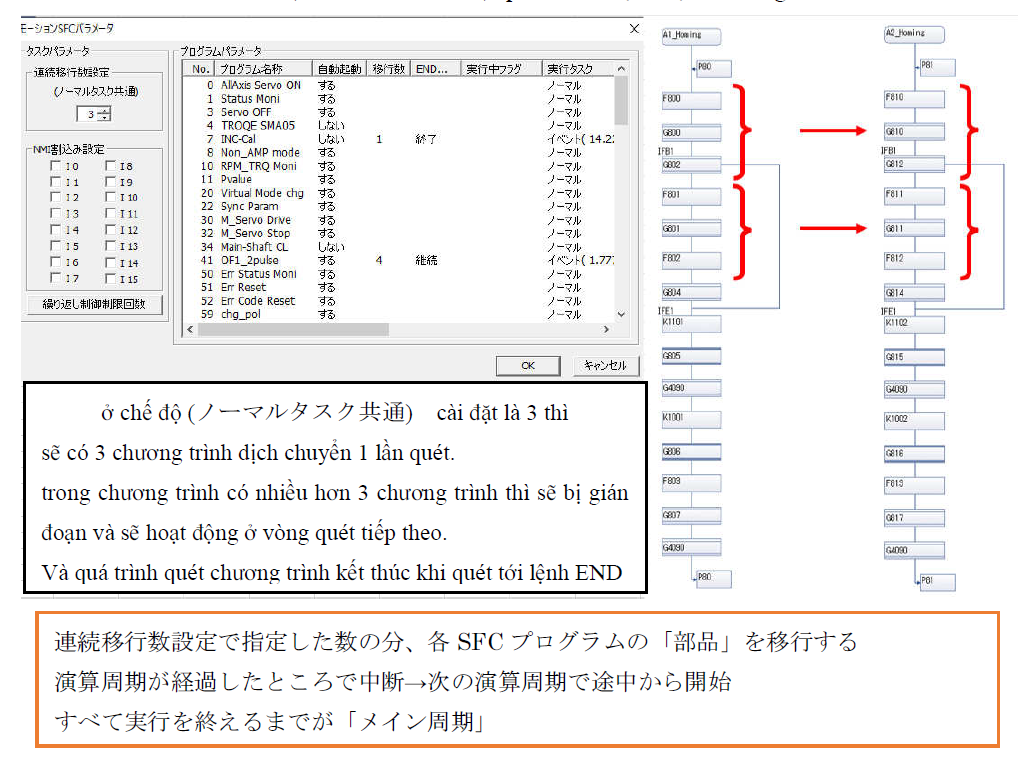
4. Chu trình quét của chương trình SFC
プログラム実行の流れ(ノーマルタスク) quá trình thực hiện chương trình
5. Chế độ thực và chế độ ảo (リアル/仮想モード)
➡ Chế độ thực (リアルモード)
Có thể điều khiển trực tiếp động cơ từ chế chương trình servo bằng nhiều lệnh (サーボプログラムで、直接サーボモータを駆動する方法) ZERO、CPSTART1,2,3,4、INC-1,2,3,4…..
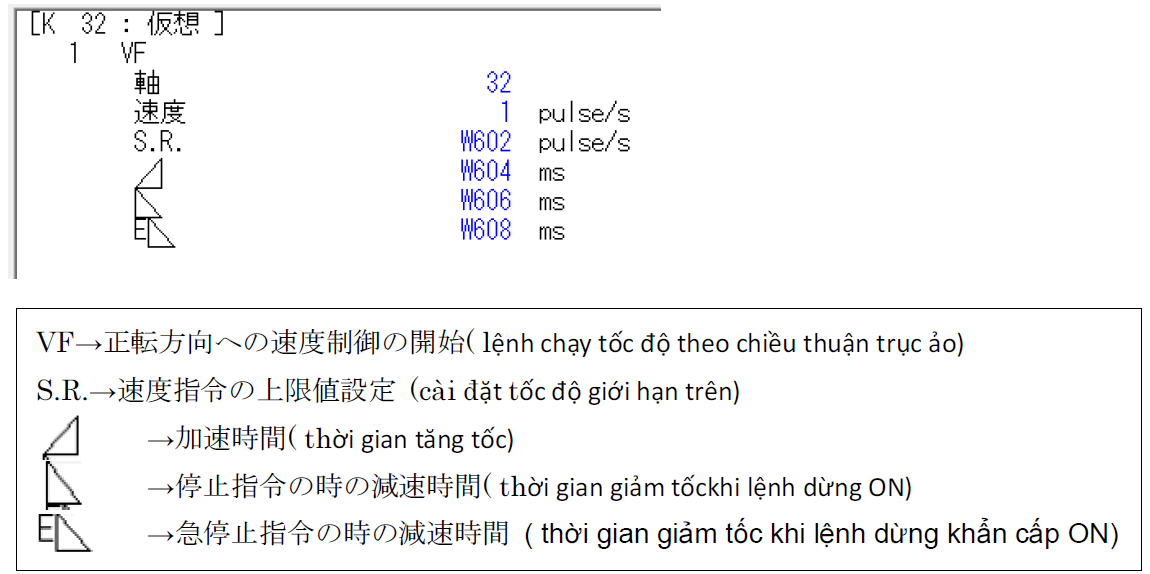
➡ Chế độ ảo (仮想モード)
Motion hỗ trợ OS SV22 mới có thể chạy được chế độ ảo
Ở chế độ này thì có thể dùng chương trình servo, cơ cấu encoder bên ngoài, cơ cấu cơ khí ảo,.. để điều khiển servo.
Các lệnh thường dùng cho trục ảo như là VF、INC-1,2,3,4...
Chế độ này thường dùng để đồng bộ tốc độ của nhiều trục servo.
(モーションOSのSV22のみに存在する制御モード、サーボプログラムや外部エンコーダを使用して、メカ機構プログラムの駆動モジュールを動かし、サーボモーターを駆動する方法、同期運転に多く使用される)
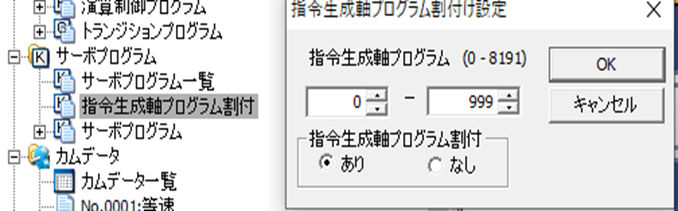
Các thông số cài đặt ở mục này sẽ là các lệnh chạy chế độ trục ảo(ここで設定された区間内の番号は、仮想モードでの指令となる)
Ví dụ:
・K0~K999:chạy chế độ trục ảo (仮想モード用)
・K1000~:chạy chế độ thực(リアルモード用)
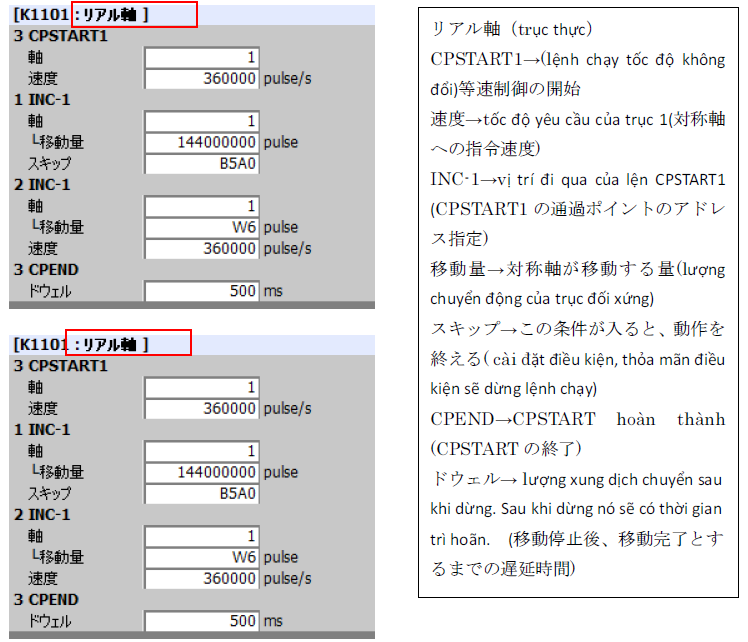
Mình sẽ giải thích lệnh này kỹ xíu.
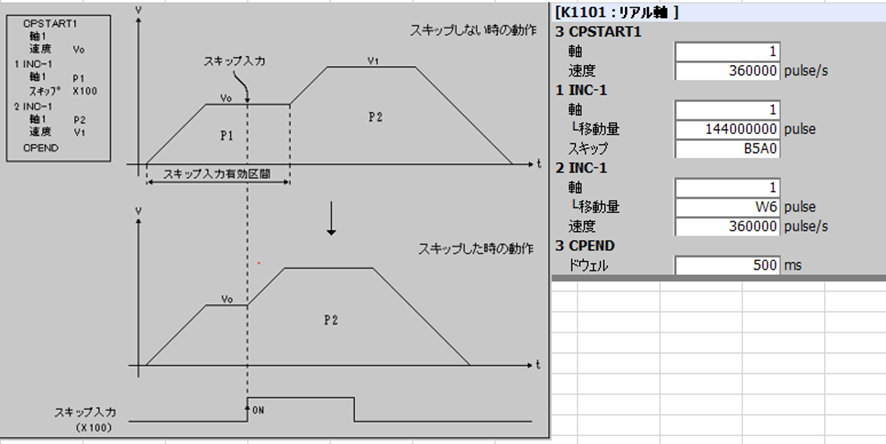
Lệnh khởi tạo sẽ chạy với tốc độ đã cài đặt và chạy qua điểm đã cài đặt cho đến khi lệnh CPEND thì dừng. và nếu có cài đặt スキップ thì khi スキップ ON thì lệnh sẽ dừng và chuyển tiếp qua chương trình hoặc lệnh tiếp theo.
(設定した速度で、指定したポイントを通り、CPENDまで等速で移動する
INC、ABSなどの命令にて通過ポイント設定が可能
スキップに設定した条件がONした場合、即時に次の動作に移行する(次の動作移行時に停止しない)
6. Tổng kết :
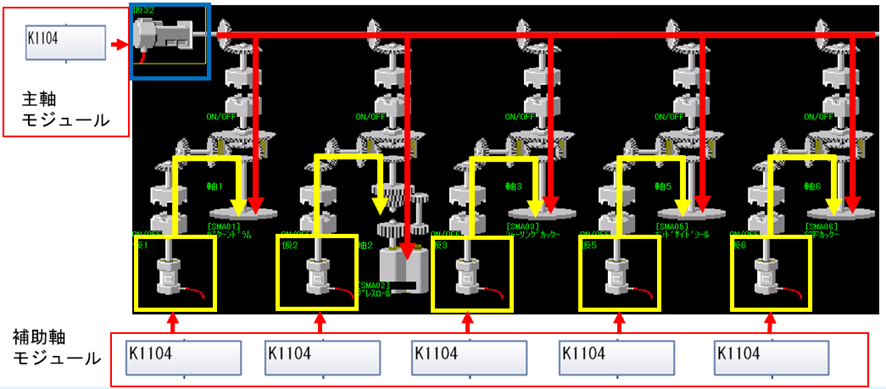
Motion là CPU để điều khiển chuyển động của servo. Có thể hoạt động chế độ trục thực và trục ảo giúp ta điều khiển trực quan hơn và dễ dàng hơn. Như ở chế độ đồng bộ nhiều trục, chạy chế độ cam, thay đổi tốc độ, thay đổi tỉ lệ số gear một cách dễ dàng hơn như ở hình trên.( メカ機構)
Bài tiếp theo mình sẽ nói rõ về cài đặt (メカ機構) cơ cấu cơ khí như hình trên. Và cách tính toán hệ số gear, số xung, cơ chế thay đổi tốc độ….
Tuy là nói motion điều khiển cài đặt dễ hơn nhưng nếu mới bắt đầu sẽ khó khăn ở ngôn ngữ SFC, các biến thanh ghi chuyên dụng rất nhiều, cài đặt parameter chức năng cấu hình rắc rối khó nhớ, và bắt buộc phải có nền tảng kiến thức về PLC mới tư duy được. Đây là ý kiến cá nhân của mình. Nên nếu mọi người muốn tìm hiểu học hay làm việc thì đừng sớm nản.chí và cố lên nhé.
Chúc mọi người ngày mới vui vẻ. Nếu có gì thắc mắc có thể liên hệ qua page dưới, mình sẽ cố gắng hướng dẫn trong phạm vi kiến thức của mình cho những anh em yêu nghề.


Đăng Huyên

Comments ()