Có ông khách email cho Mr Min hỏi cách sử dụng của 2 loại động cơ trên. Mr.Min cũng biết nhưng không tự tin lắm, thế là vát rượu mang sang nhà Mr. Èn, trước là hỏi thăm sức khỏe, sau là hỏi luôn bài vở để còn về trả lời khách hàng. Đời ông kỹ sư vậy đó, công việc nó ép chứ có muốn uống rượu đâu :(
Mr.Min: Anh Èn ơi, cho em hỏi một chút về động cơ bước và động cơ servo không ạ?
Mr.Èn: Một chút thôi thì được nhé. Em muốn hỏi gì vậy?
Mr.Min: Về cái bài động cơ bước anh em mình hôm trước trao đổi về động bước ấy anh.
Mr.Èn: Bài này hả em?
Mr.Min: Vâng đúng rồi ạ. Em thấy cả động cơ bước và động cơ servo đều là những động cơ có thể định vị chính xác, thế thì cụ thể chúng có gì khác nhau anh nhỉ? Hôm qua ông khách gửi mail hỏi mà em chưa dám trả lời, giờ hỏi anh cho chắc.
Mr.Èn: Tưởng ai hỏi chứ khách hỏi thì ta phải trả lời cho chỉn chu thôi.
Trước hết, anh sẽ giải thích ngắn gọn vềcấu tạo của từng loại động cơ nhé.
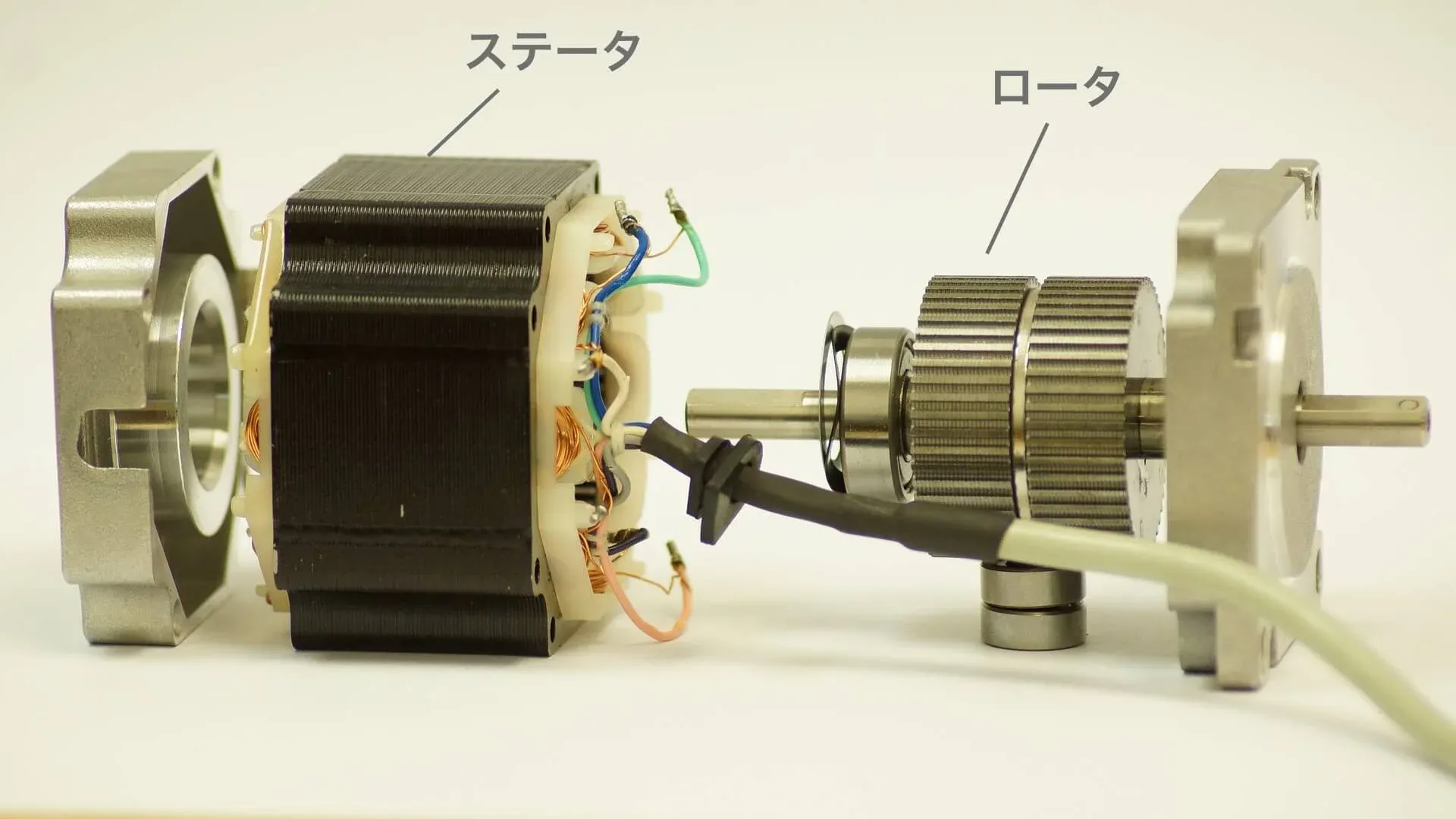
● Cả động cơ bước và động cơ servo đều được tạo thành từ hai bộ phận là stator và rotor.
● Dù cả hai bộ phận này đều giúp xác định vị trí bằng cách tương tác với nhau, nhưng cấu trúc của chúng lại khác nhau.
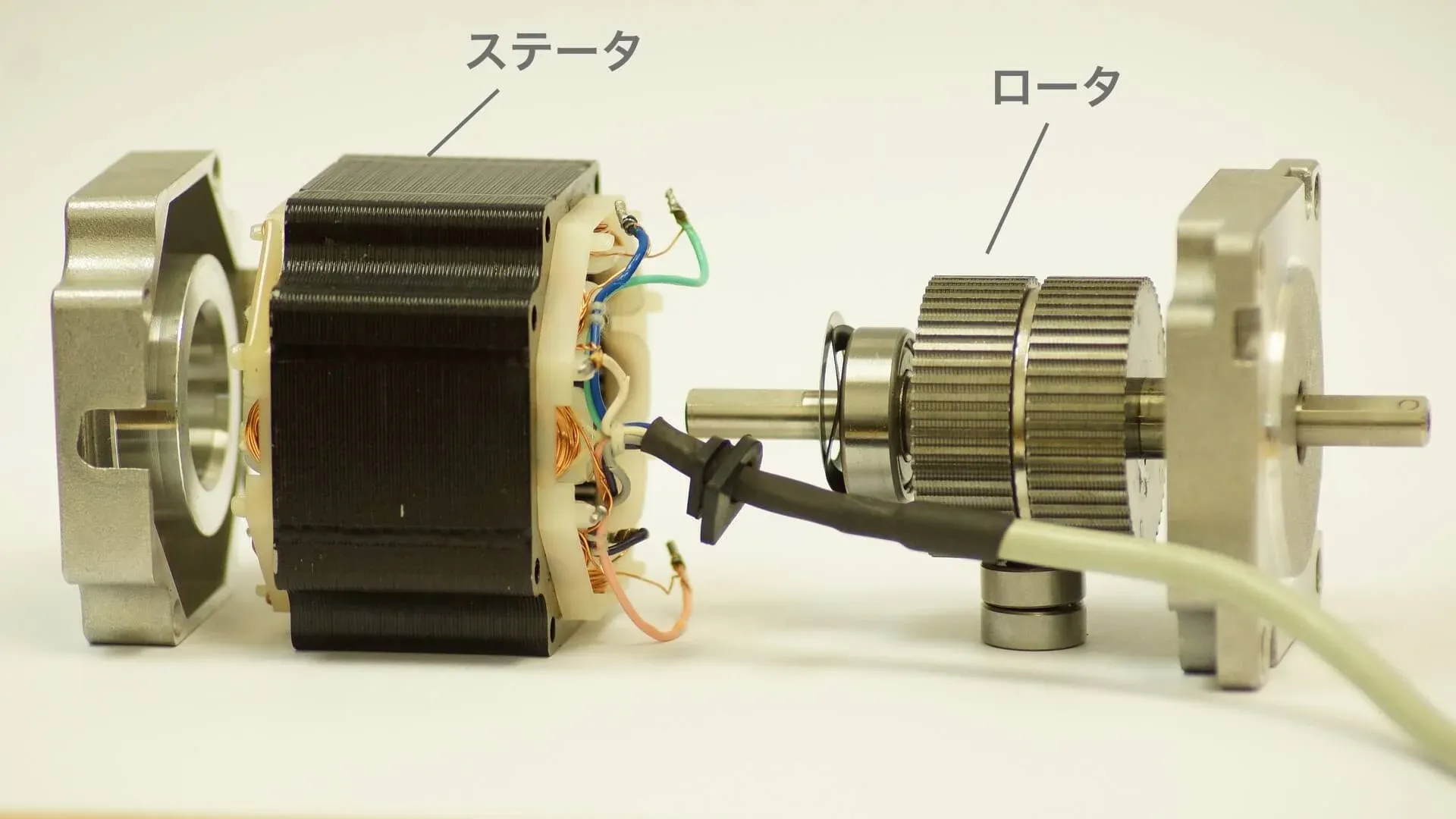

Em xem kĩ chỗ con Roto của động cơ bước, chúng có các răng nhỏ được chạm khắc ở bề mặt ngoài Roto, mỗi răng nhỏ này sẽ tương tác với stato theo từng góc cực nhỏ để đảm bảo việc xác định vị trí chính xác.
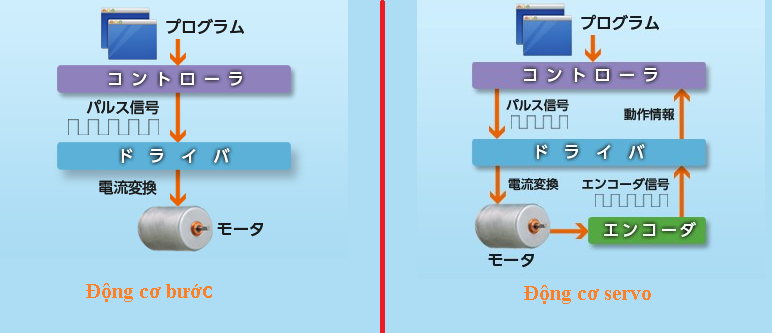
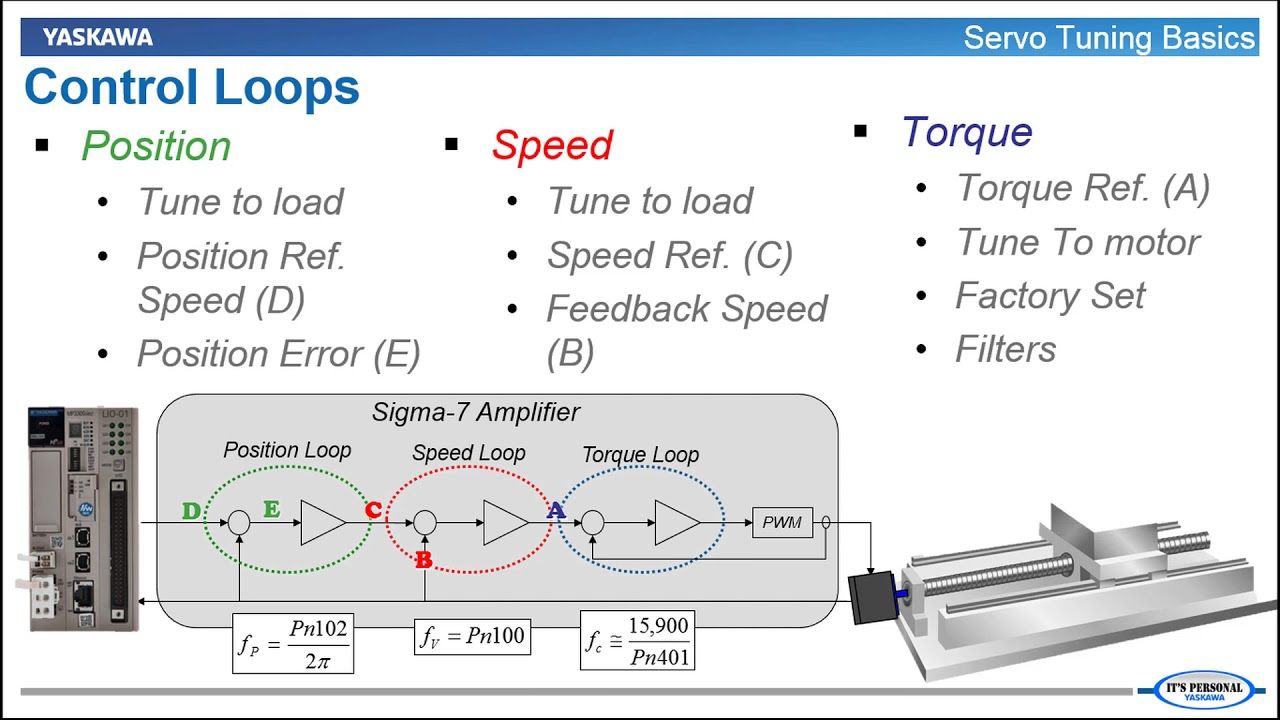
Ngược lại, động cơ servo không nhờ vào độ chính xác thông qua cấu trúc cơ học, mà thay vào đó, nó xác định vị trí dựa trên thông tin phản hồi từ cảm biến vị trí (encoder).
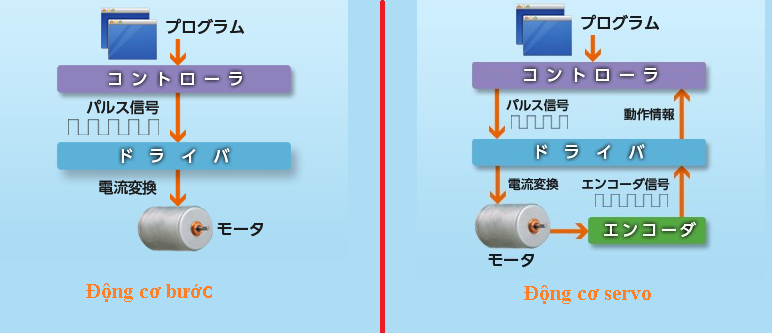
Xem Video dưới đây để hiểu hơn về cấu tạo của động cơ bước nha:
Tóm lại độ chính xác của động cơ phụ thuộc vào:
+ Động cơ bước : độ tinh vi của bánh răng Roto
+ Động cơ Servo: độ phân giải của Encoder
Mr.Min: Ah thì ra là vậy.
Mr.Èn: Tiếp theo, em thử nói xem đặc điểm khác nhau đặc trưng của 2 loại động cơ trên xem nào?
Mr.Min: Vâng có phải khác nhau ở chỗ 1 loại thì cần thiết phải điều chỉnh Gain, 1 loại thì không cần thiết không ạ?
Mr.Èn: Đúng là cần điều chỉnh độ nhạy Gain thật, nhưng còn một sự khác biệt dễ thấy hơn nữa. Em xét đặc điểm của mô men xoắn (torque) thử xem, biết đâu tìm được gợi ý.
Mr.Min: Là đặc tính mô men xoắn ạ?
Mr.Èn: Đúng rồi em, nhìn cái sơ đồ đặc tính ở momen xoắn dưới này nhé.
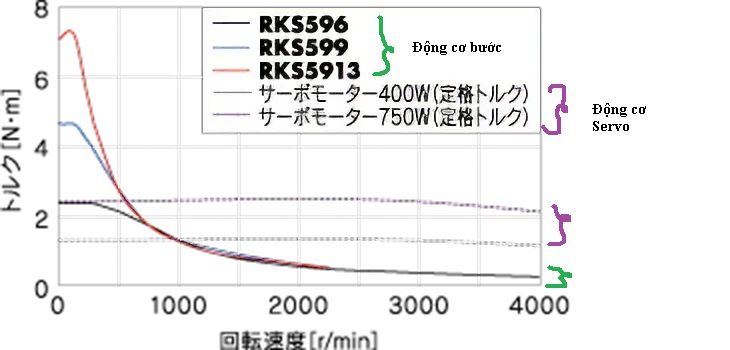
Mr.Min: Nhìn biểu đồ theo em hiểu thì động cơ bước có mô men xoắn lớn ở vùng tốc độ trung bình và thấp, còn động cơ servo thì mô men xoắn lớn ở vùng tốc độ cao.
Mr.Èn: Cũng khá đúng đấy, thế dựa vào đồ thị mô men xoắn này, em rút ra được khi nào dùng động cơ nào chưa?
Mr.Min: Vâng... động cơ bước thích hợp cho việc sử dụng ở vùng tốc độ trung bình và thấp, còn động cơ servo thì thích hợp ở vùng tốc độ cao, phải không ạ?
Mr.Èn: Bingo! Vậy thì em thử nêu ứng dụng cụ thể dùng tốc độ trung bình thấp xem nào?
Mr.Min: Nếu mà không cần thiết phải tăng tốc lên cao thì với các ứng dụng di chuyển ngắn như điều khiển bước dao của bàn chia độ có phải không ạ?
Mr.Èn: Đúng vậy. Thêm vào đó, với các ứng dụng có sự di chuyển ngắn như điều khiển bước xoay thì thường tốc độ quay sẽ dưới 1000 vòng/phút.
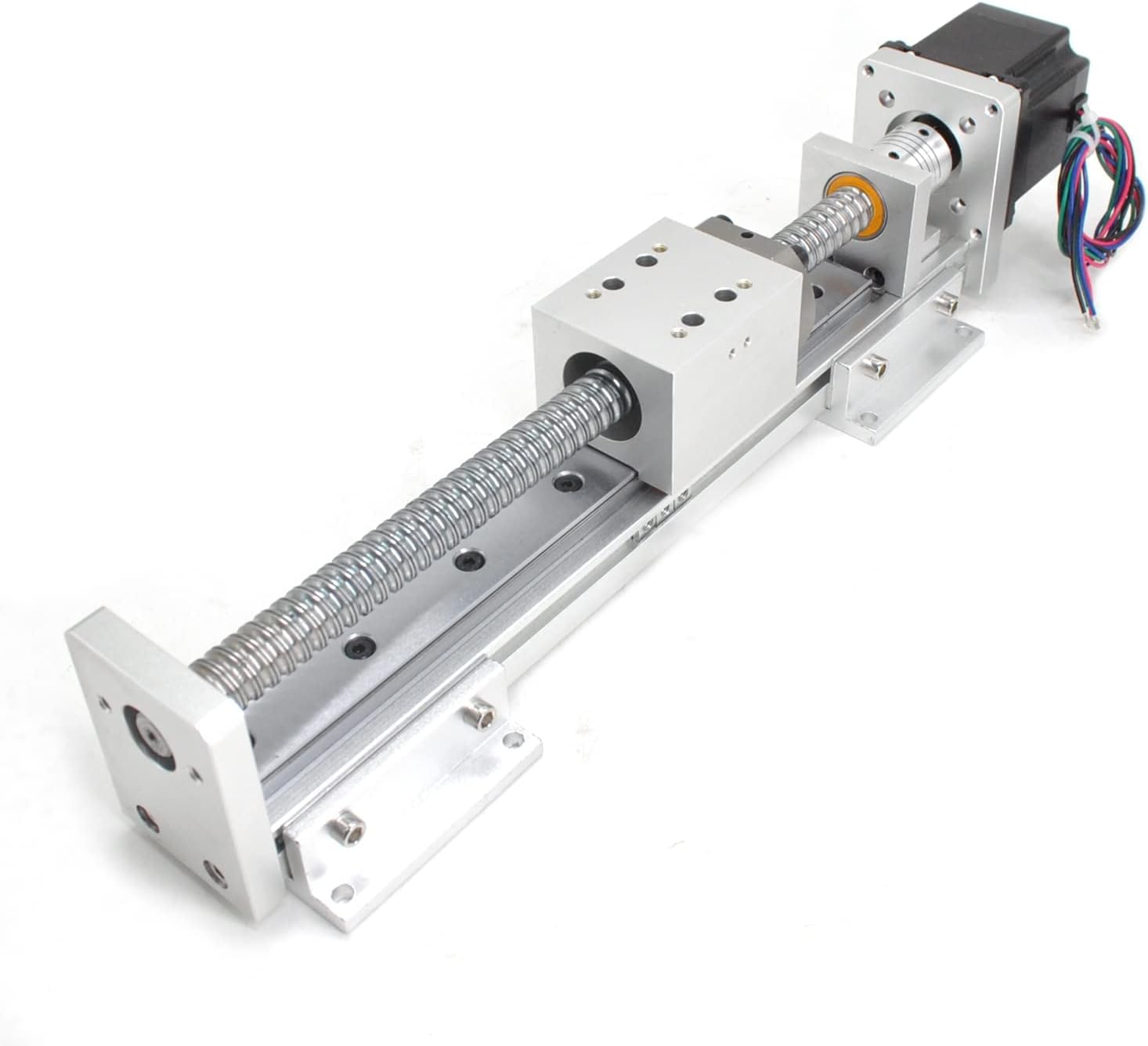
Mr.Min: Em hiểu rồi ạ! Ngược lại thì với servo sẽ dù chạy ở tốc độ cao nhưng momen xoắn nó không thay đổi, rất phù hợp cho các ứng dụng tốc độ cao với hành trình dài, ví dụ như cơ cấu trục vít me phải không ạ?
Mr.Èn: Chuẩn rồi! Em hiểu rõ rồi đấy.
Nhưng nếu với các trục vít me có hành trình ngắn thì dùng động cơ bước để vận hành với độ chính từng inch thì cũng vấn đề gì đâu nhé.
Tóm lại nếu muốn giảm chi phí thì vít me hành trình ngắn dùng động cơ bước, còn không quan tâm tới chi phí thì dài hay ngắn servo cũng làm được hết.
Mr.Min: Cảm ơn anh! Em sẽ phản hồi email một cách dễ hiểu cho khách hàng.
Mr.Èn: Ok em, nếu muốn đặt câu hỏi thì liên hệ với anh qua trang page này nhé!


Lần này chỉ là đặc tính, còn lần sau anh sẽ giải thích tiếp tính năng của chúng khác nhau thế nào, nhớ đón đọc.
Tổng kết:
Động cơ bước: Dùng cơ cấu cơ khí (bánh răng nhỏ trên roto) để tăng độ chính xác. Dùng trong trường hợp Cost Down và hành trình ngắn.
Động cơ servo dựa vào tín hiệu phản hồi từ encode (độ phân giải), dùng cho trường hợp hành trình dài cần nhiều momen xoắn.
Nguồn: https://www.orientalmotor.co.jp/ja/tech/eng-note/vol75
Nhân Nguyễn
Comments ()