Sơ Đồ Mạch Điện (Phần 3): Mạch Điều Khiển Máy Bơm Với Cảm Biến
Chào các bạn! Trong bài viết này, chúng ta sẽ tìm hiểu về việc điều khiển máy bơm một cách an toàn, tránh vận hành khi không có nước, bằng cách tích hợp cơ chế kiểm tra mức nước trong bể cấp. Đây là cải tiến quan trọng để bảo vệ máy bơm, tăng độ bền và hỗ trợ tự động hóa hệ thống.
Việc kiểm tra mức nước trước khi khởi động máy bơm giúp:
- Bảo vệ thiết bị: Ngăn máy bơm chạy khô, tránh hư hỏng cơ khí hoặc quá nhiệt.
- Tăng hiệu quả: Đảm bảo máy bơm chỉ hoạt động khi có đủ nước, tối ưu hóa năng lượng.
- Tự động hóa: Dễ dàng tích hợp với cảm biến mức nước và PLC để vận hành tự động.
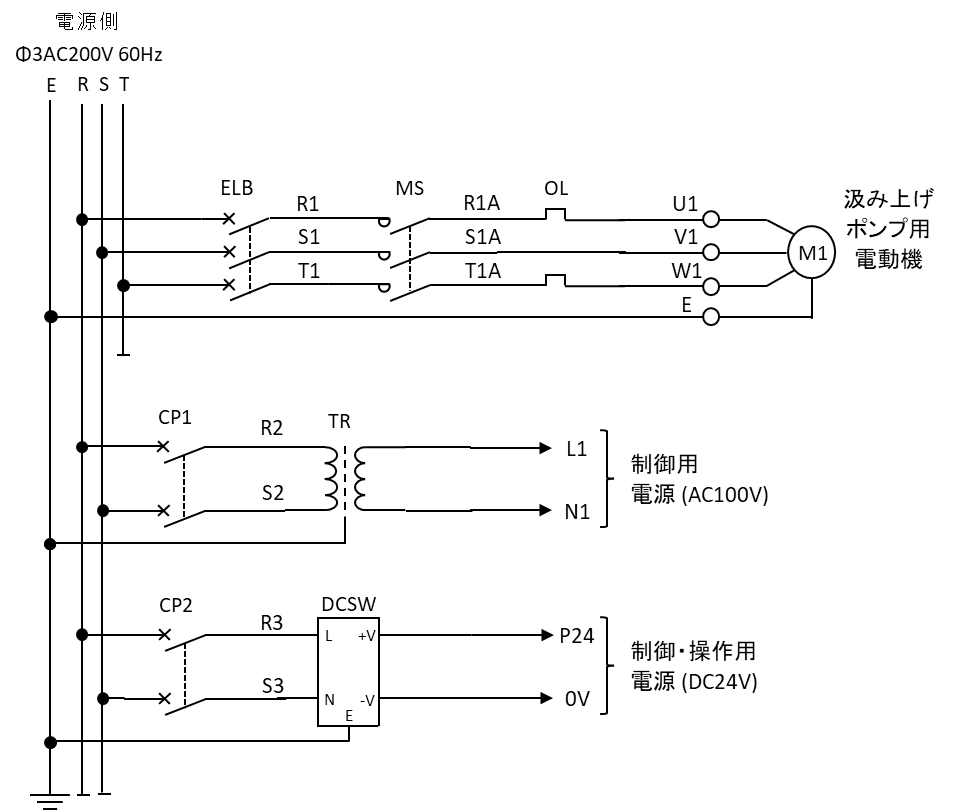
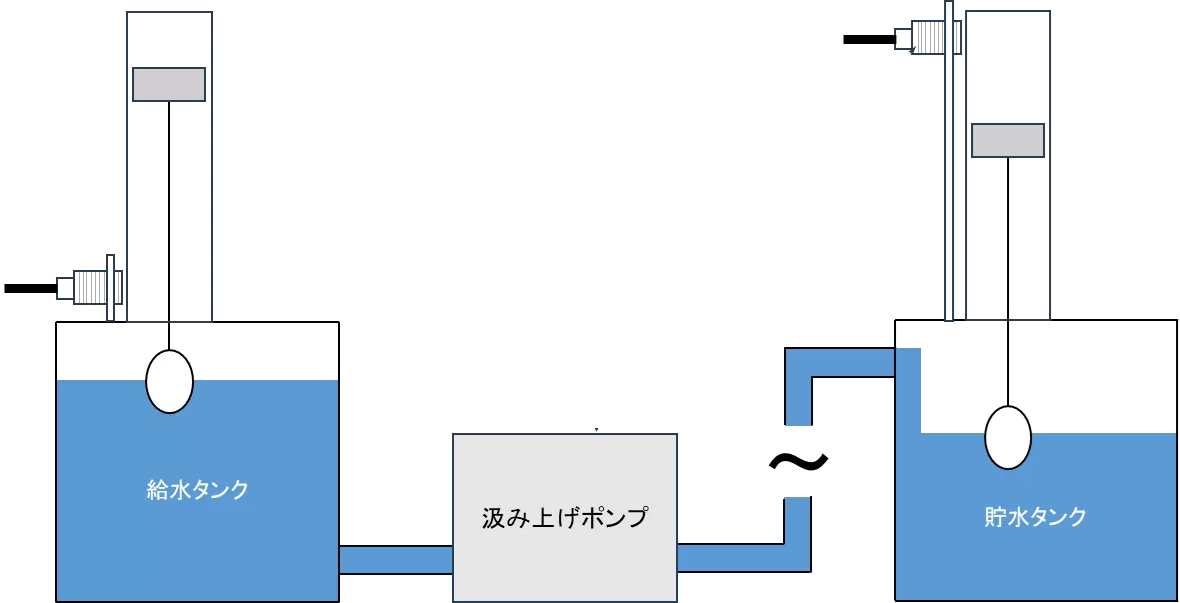
Tổng quan về bể nước bơm
Để đảm bảo máy bơm không chạy khi không có nước thì hệ thống sử dụng:
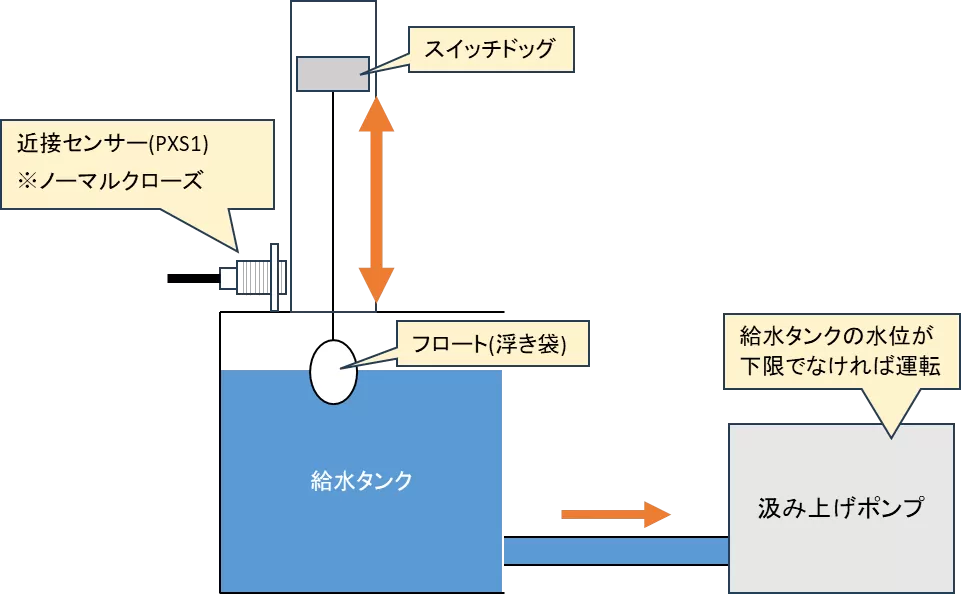
- Đồng hồ đo mức phao: Được lắp trong bể để theo dõi mức nước, cung cấp tín hiệu về mức nước tối thiểu, tối đa hoặc các mức trung gian.
- Cảm biến tiệm cận: Đặt ở vị trí giới hạn dưới của bể để phát hiện khi mực nước quá thấp, báo hiệu nguy cơ bơm khô. Cảm biến này không cần tiếp xúc vật lý, đảm bảo độ bền và hoạt động ổn định trong môi trường ẩm ướt, nhiều bụi hoặc dầu.
Cảm Biến Tiệm Cận Là Gì?

Nguồn trích dẫn: Cảm biến tiệm cận Omron E2E
Cảm biến tiệm cận (dựa trên dòng Omron E2E) là thiết bị phát hiện vật thể mà không cần tiếp xúc, lý tưởng cho môi trường khắc nghiệt như bể nước. Đặc điểm chính:
- Không có bộ phận chuyển động: Đảm bảo độ bền cao, không mài mòn, phù hợp với môi trường ẩm, dầu hoặc bụi.
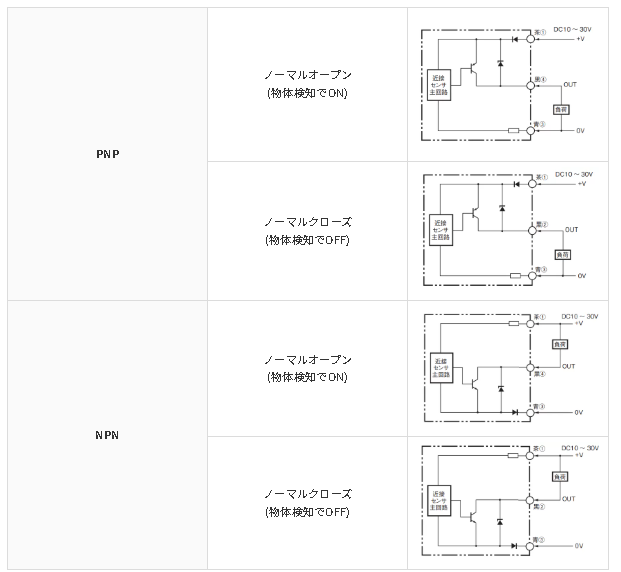
Loại 3 dây (NPN/PNP):
- NPN: Tải kết nối với 24V, cảm biến xuất 0V khi phát hiện vật thể.
- PNP: Tải kết nối với 0V, cảm biến xuất 24V khi phát hiện vật thể.
- Lưu ý: Phải chọn đúng loại NPN hoặc PNP để tương thích với mạch điều khiển, tránh lỗi kết nối hoặc lãng phí.
Đối với cảm biến tiệm cận E2E của OMRON, các phương pháp kết nối NPN và PNP như sau.
Tại Sao Dùng Cảm Biến Thường Đóng (NC)?
Cảm biến tiệm cận có hai loại đầu ra:
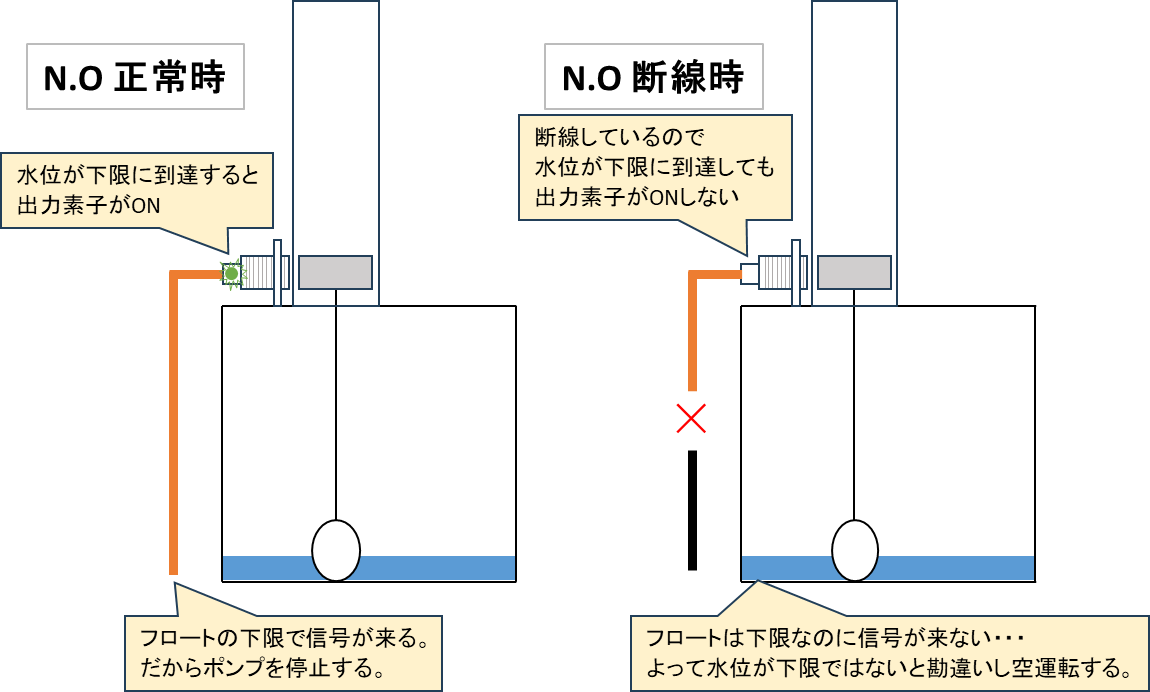
- Thường mở (NO): Mạch hở khi bình thường, đóng mạch khi phát hiện vật thể.
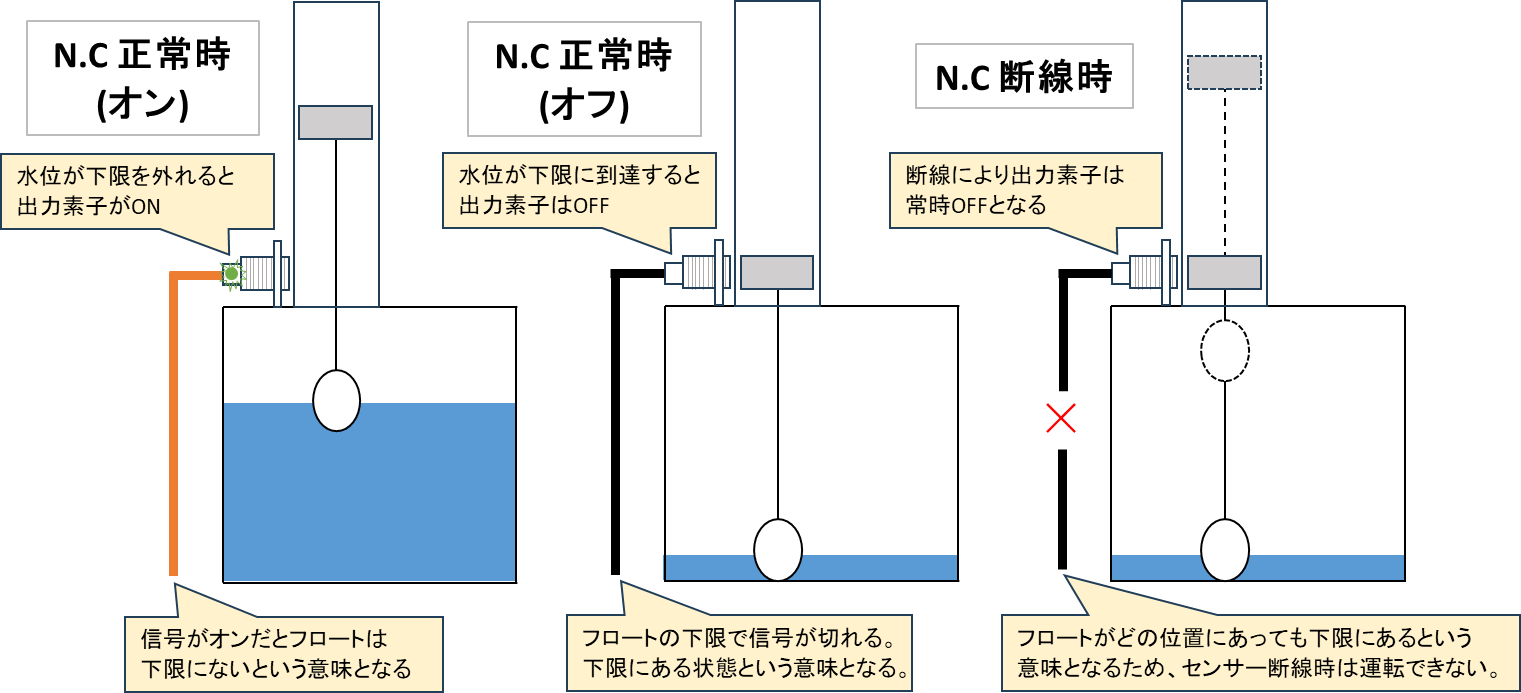
- Thường đóng (NC): Mạch kín khi bình thường, hở mạch khi phát hiện vật thể.
Trong hệ thống kiểm tra mức nước, cảm biến thường đóng (NC) được ưu tiên để phát hiện giới hạn dưới, vì:
- An toàn khi lỗi: Nếu dây cảm biến bị đứt, mạch NC sẽ ngắt (tương tự trạng thái phát hiện mực nước thấp), khiến máy bơm dừng, tránh chạy khô.
- So sánh với NO: Nếu dùng cảm biến NO, khi dây đứt, hệ thống không nhận tín hiệu, có thể nhầm là "nước đủ" và cho bơm chạy, gây hư hỏng.
Nếu bạn sử dụng tiếp điểm thường mở.
| Trạng thái cảm biến | Vị trí phao | Đầu vào tín hiệu | Hoạt động của máy bơm |
|---|---|---|---|
| bình thường | Giới hạn dưới | bật | ○ Không thể |
| Ngoài giới hạn dưới | tắt | ○ Có thể | |
| Ngắt kết nối | Giới hạn dưới | tắt | ✕ Có thể |
| Ngoài giới hạn dưới | tắt | ○ Có thể |
Nếu sử dụng cảm biến tiệm cận tiếp điểm thường mở (NO), khi dây bị đứt, cảm biến không gửi tín hiệu, khiến hệ thống nhầm tưởng mực nước trong bể không ở mức thấp. Điều này có thể dẫn đến việc máy bơm tiếp tục chạy dù không có nước, gây hư hỏng thiết bị.
Nếu bạn sử dụng tiếp điểm thường đóng
| Trạng thái cảm biến | Vị trí phao | Đầu vào tín hiệu | Hoạt động của máy bơm |
|---|---|---|---|
| bình thường | Giới hạn dưới | tắt | ○ Không thể |
| Ngoài giới hạn dưới | bật | ○ Có thể | |
| Ngắt kết nối | Giới hạn dưới | tắt | ○ Không thể |
| Ngoài giới hạn dưới | tắt | ○ Không thể |
Nếu sử dụng cảm biến tiệm cận tiếp điểm thường đóng (NC), hệ thống sẽ hoạt động an toàn trong mọi trường hợp. Khi dây bị đứt, cảm biến ngắt mạch, khiến thiết bị nhận diện mực nước ở giới hạn dưới bất kể vị trí thực tế, do đó ngăn máy bơm vận hành, tránh hư hỏng.
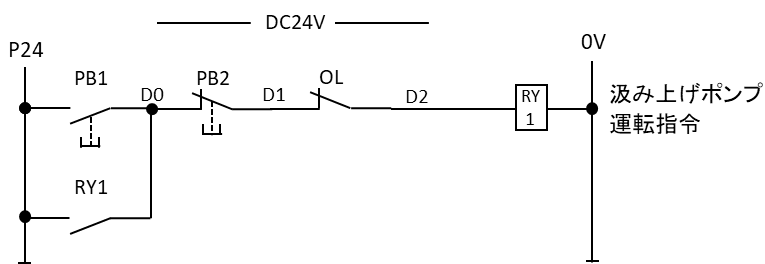
Thiết kế mạch điều khiển
Thêm khóa liên động giới hạn dưới cho két nước
Thêm một khóa liên động vào mạch trên để dừng máy bơm ở giới hạn dưới của bể nước.
Đầu tiên, chúng ta hãy xem bản vẽ đã hoàn thành.
Sự khác biệt so với mạch ban đầu là phần màu đỏ.
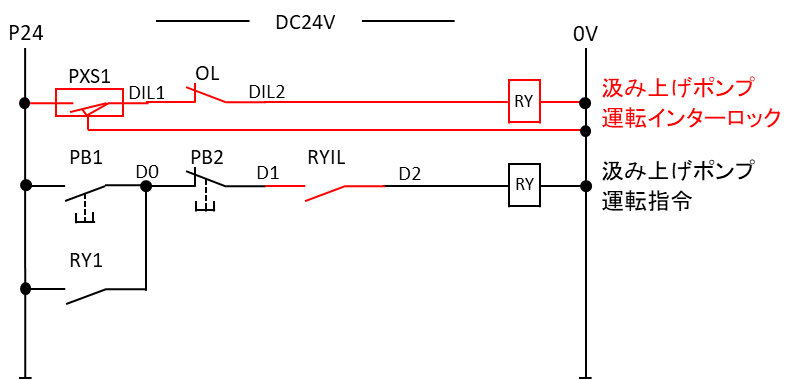
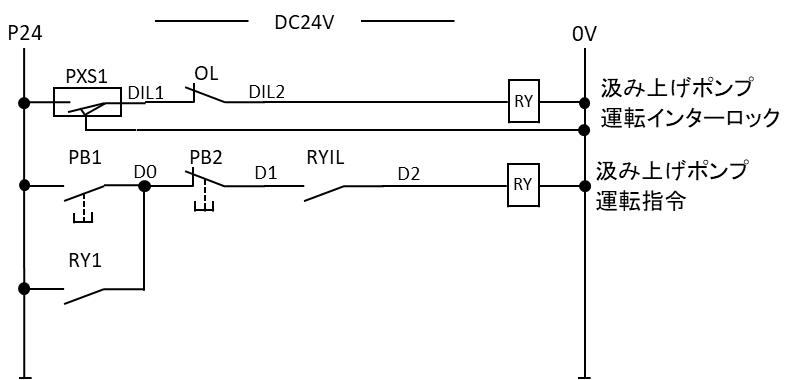
Mạch khóa liên động hoạt động của máy bơm
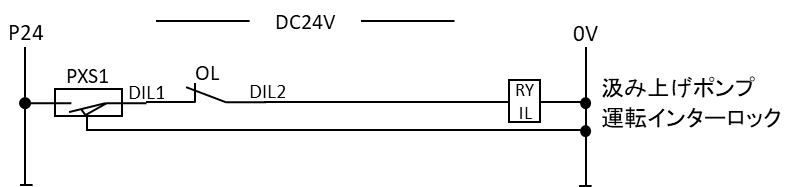
| Ký hiệu | giải thích |
|---|---|
| PSX1 | Cảm biến phát hiện khi nước cạn |
| OL | Rơ le nhiệt động cơ bơm |
| RYIL | Rơ le khóa liên động |
Để cung cấp +24V cho tải (rơ-le RYIL), tôi sử dụng cảm biến tiệm cận loại đầu ra PNP.
Quy tắc hoạt động của mạch như sau:
- Khi cảm biến giới hạn dưới của bể cấp nước (PSX1) không phát hiện mực nước thấp,
- Và rơ-le nhiệt của động cơ máy bơm hoạt động bình thường,
thì rơ-le RYIL được kích hoạt (ON).
Máy bơm chỉ có thể vận hành khi RYIL ở trạng thái ON.
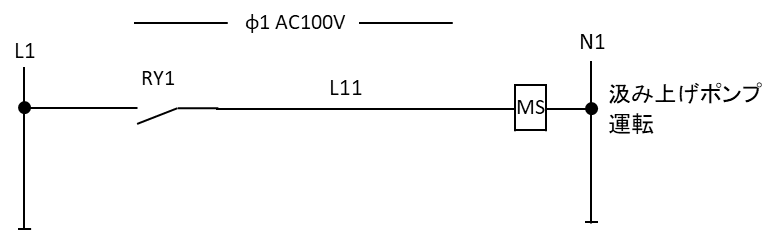
Mạch Điều Khiển Vận Hành Máy Bơm
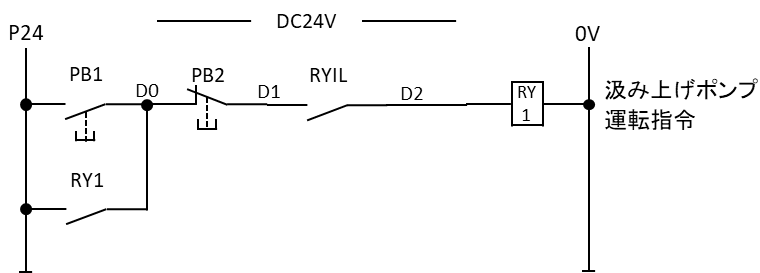
Tiếp điểm của rơ-le khóa liên động RYIL được tích hợp vào mạch điều khiển vận hành theo logic AND.
Khóa liên động được cài đặt để đảm bảo an toàn và bảo vệ thiết bị, ưu tiên dừng máy bơm khi cần.
Như trong sơ đồ, mạch được thiết kế để máy bơm tuyệt đối không thể hoạt động khi bể cấp nước đạt giới hạn dưới hoặc rơ-le nhiệt bị kích hoạt (trip).
Kết Luận
Chúng ta đã thiết kế thành công mạch điều khiển máy bơm với cảm biến tiệm cận NC, đồng hồ đo mức phao và khóa liên động. Mạch này đảm bảo an toàn, ngăn chạy khô khi mực nước thấp hoặc lỗi hệ thống, đồng thời dễ vận hành và sẵn sàng mở rộng cho tự động hóa. Trong bài viết tiếp theo, chúng ta sẽ tích hợp cảm biến mức nước tối đa và thêm các mạch an toàn.
Bài viết tham khảo từ: https://taroimo-lifestyle.com
Hãy tiếp tục theo dõi VJAU để cập nhật thêm kiến thức nhé!
Xuân Thanh
Comments ()